
发明人:史治国; 陈剑锋; 单国峰; 郑航
申请日期:2020-08-07
授权日期:2023-07-07
本专利对应产品、技术优势、性能指标:本发明公开了一种自动探测测向的无人机方法,首先布设6根侦测天线轮询检测空中射频信号并接收信号;当侦测天线接收信号的中心频率符合0.4~6GHz范围时,使用方形阵列进行精确测向,并根据侦测天线接收信号的电平大小,确定信号来波区域和方形阵列中单面测向线性阵列的选择策略;然后对单面测向线性阵列的接收信号进行张量建模和张量空间谱构造,实现精确测向;最后,对测向扇区中相邻两根侦测天线的接收信号电平大小进行再次判断,从而得到目标信号的波达方向估计,即为无人机的定位结果。本发明在测向时采用张量建模,并采用侦测天线和测向天线联合判断的方式,克服多径信号的影响,实现目标信号筛选,得到精准的无人机定位结果。
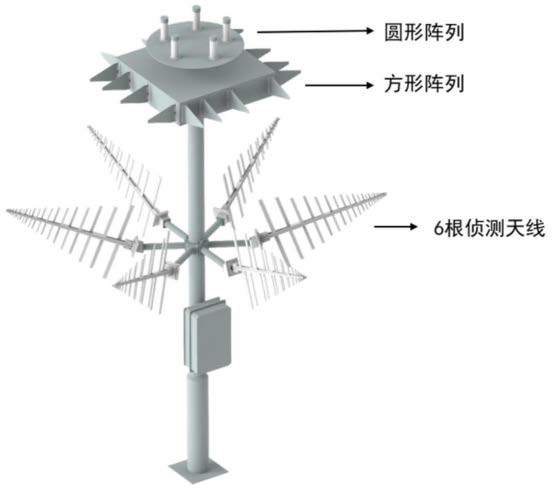
图1 自动探测测向无人机的天线装置

图2 单面测向线性阵列对接收信号进行波达方向估计过程的张量空间谱
产业化前景描述:现有的基于无人机射频信号的探测测向方法存在灵活性有限、无法处理多径信号、硬件限制等问题,导致在实际应用中缺乏可靠性。本发明实现了一种能够在0.4~6GHz频段内对无人机信号进行联动检测和定位的方法。与传统方法相对独立,本发明设计了一种宽频段的自动探测测向无人机的方法,能够有效保留信号的原始结构化信息,并实现张量空间的参数特征提取,从而保证了测向的精确性和高效性。此外,本发明采用侦测天线和测向天线联合判断的方式,克服了多径信号的影响,实现目标信号筛选,最终得到精准的无人机定位结果。
发明人:史治国; 陈积明; 许博雅; 孔杰
申请日期:2019-09-24
授权日期:2020-11-24
本专利对应产品、技术优势、性能指标:本发明公开了一种地震模拟振动台迭代控制方法,具体步骤包括:根据加速度指令信号和振动台台面采集的加速度输出信号求系统的频响函数;对系统频响函数做指数滑动平均滤波,使频响函数光滑并降低估计误差;对滤波后的系统频响函数在幅值和相位上分别进行插值,使系统频响函数对应的频率点和加速度期望信号的傅里叶变换对应的频率点相同;根据加速度期望信号和振动台台面采集的加速度输出信号计算加速度误差信号,并对误差信号做傅里叶变换;求取下一次迭代实验的加速度指令信号。本发明能够通过多次迭代实验提高振动台复现的加速度波形跟踪期望波形的精度。

图1 本发明的控制方法的流程图
产业化前景描述:如何在地震模拟振动台试验中精确复现期望波形,并准确得到系统特性,以提高地震模拟振动台的加速度输出波形精度。本发明提供了一种地震模拟振动台迭代控制方法,通过利用指数滑动平均滤波使估计的频响函数变得光滑并降低估计误差,同时在幅值和相位上分别做插值处理,提高频响函数的频率分辨率。通过截取频响函数有效频率区间和幅值饱和限幅,计算系统逆频响函数,再利用振动台台面的输出波形和期望波形得到复现波形的控制误差,通过迭代过程不断修正下一次试验的控制量,得到一个有效的输入控制信号,使得振动台台面的输出波形能够更加精确的跟踪期望波形。
发明人:史治国; 何倩雯; 刘颖; 吴均峰; 陈积明
申请日期:2019-04-10
授权日期:2020-05-22
本专利对应产品、技术优势、性能指标:本发明公开了一种用于FPGA的并行Jacobi计算加速实现方法。n×n维矩阵的数据输入到FPGA中利用并行Jacobi计算进行旋转变换处理,处理单元初始化,对角处理单元计算旋转角度对应的符号集并输出给非对角处理单元,对角处理单元元素更新,非对角处理单元元素更新,处理单元间元素交换,在对每个处理单元的元素进行更新后,将更新后的处理单元之间的元素进行交换。本发明能使用较少的FPGA资源,提高FPGA内部计算处理性能,能够有效地提高特征值分解在FPGA上实现的效率,在实际工程中有较高的应用价值。
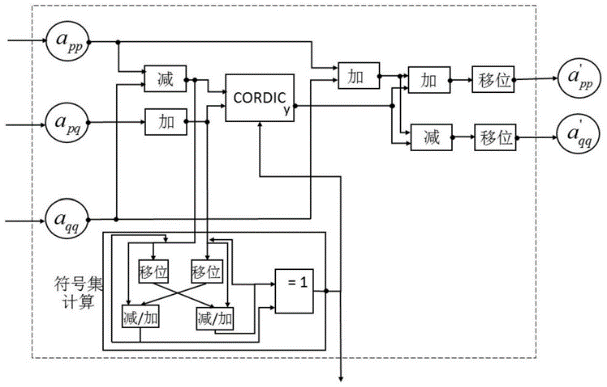
图1对角处理单元结构图

图2非对角处理单元结构图
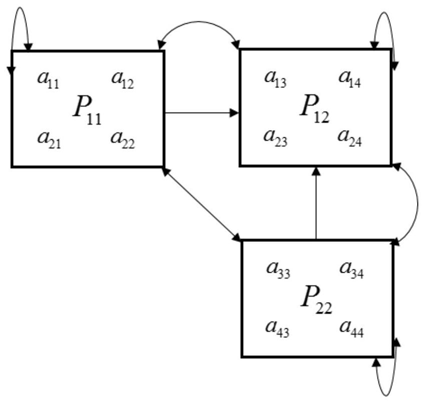
图3处理单元阵列结构图
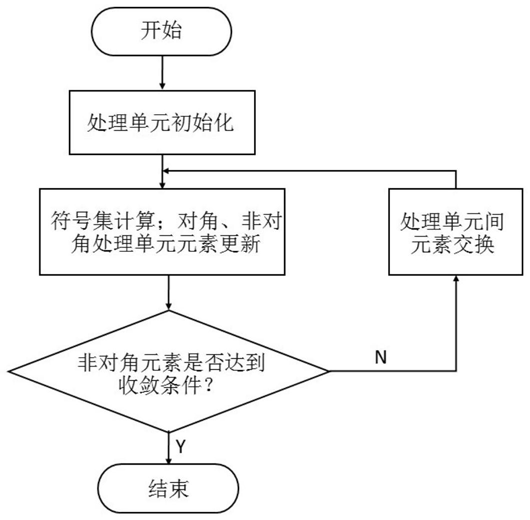
图4计算方法流程图
产业化前景描述:如何在雷达、无线通信、图像处理等领域,快速高效地计算矩阵的特征值,特别是在大规模矩阵中如何实现并行Jacobi计算的一步,同时考虑FPGA中LUT资源的消耗量。本发明采用特殊设计的线性组合方法,取代现有并行Jacobi计算中的双边旋转方法,并利用旋转角度符号集和两符号集的组合来代替计算旋转符号的步骤,提高了并行Jacobi计算的并行性,减少了计算时间,实现了在一个CORDIC周期内的一步并行Jacobi计算。同时,本发明能有效地提高并行Jacobi计算在硬件上的实现速度,提高了特征值分解在FPGA上的效率,使用较少的FPGA资源,具有较高的应用价值。
发明人:史治国; 程翠; 常先宇; 陈积明; 杨超群; 史秀纺
申请日期:2017-01-12
授权日期:2019-04-12
本专利对应产品、技术优势、性能指标:本发明公开了一种基于声纹多谐波识别的无人机方向估计方法。传统的基于高分辨率谱的非相干子空间波达方向估计算法,将宽带信号分成各个窄带信号,在窄带上用多重信号分类(MUSIC)算法进行角度估计,取算数平均值。传统方法忽略了子频带的能量不均和信噪比不同,导致算法性能不佳。本发明方法通过对目标信源的声音信号做时频分析,得到特征频率。对宽带信号只提取特征频率所在的子频带,做窄带MUSIC运算,结合各特征子频带的能量比、信噪比,赋予各特征子频带方向角不同的加权系数,加权平均得到角度估计结果,以达到更准确的角度估计性能。

图1 一种基于声纹多谐波识别的无人机方向估计方法的流程图
产业化前景描述:传统的高分辨率谱估计算法一般适用于窄带信号,而在宽带信号处理中,该算法的表现不佳。原因是忽略了子频带的能量分布不均和信噪比各不相同,导致了算法估计性能不佳的问题。本发明提出了一种改进的ISM算法,只需要提取若干特征子频带,进行窄带MUSIC计算,就能够得到较好的估计准确性,同时计算量大大降低。与传统的算法相比,本方法是结合各特征子频带的能量比和信噪比,赋予各特征子频带方向角不同的加权系数,加权平均得到最后的角度估计结果,以达到更准确的估计性能。
发明人:孙怡琳; 史治国; 李颖; 李传武; 陈积明
申请日期:2020-12-16
授权日期:2022-06-10
本专利对应产品、技术优势、性能指标:本发明公开了一种商用车远程防盗系统及其工作方法,该系统主要由数据输入模块、控制主机、远程信息处理终端和远程信息管理平台构成。针对CAN通信时信息泄漏、数据修改、重放攻击等问题,本发明在传统的CAN数据传输上增加加密/解密机制,并向原始数据中融入计数器值和消息认证码,本发明在网络良好状态下将授权信息从远程信息管理平台实时下发至远程信息处理终端存储,控制主机上电时基于CAN通信获取远程信息处理终端存储的授权信息,防止因网络问题导致信息预置失败而影响系统工作,本发明使用远程信息管理平台对挂车和司机信息可视化管理,实现下发控制命令和更新授权信息的功能,从而帮助物流公司实现远程车队管理及挂车防盗工作。

图1 商用车远程防盗系统的结构框图


图3 数据解密流程

图4 解锁方法流程图

图5 数据解密流程
产业化前景描述:如何设计一套智能防盗系统,以解决商用车在物流公司运输中可能出现的非授权驾驶员控制挂车、驾驶员控制挂车超过授权时间、驾驶员解锁信息被盗等问题。同时,如何利用云平台实现商用车远程防盗系统的需求,以确保数据的安全性和开发任务的便捷性。本发明提出了一种商用车远程防盗系统及工作方法,通过提供一种远程防盗系统,包括数据输入模块、控制主机、远程信息处理终端和远程信息管理平台,实现了对商用车的远程防盗和管理任务。该系统能够通过数据输入模块、控制主机和远程信息处理终端进行信息的传输和解锁/上锁工作,同时通过远程信息管理平台实现对车辆状态和司机信息的可视化和管理。该系统具有较高的安全性和便捷性,能够有效防止车辆被盗和管理。
发明人:高承醒;史治国;吴均峰;谢家阳;李星翰;颜成钢
申请日期:2020-05-19
授权日期:2022-07-01
本专利对应产品、技术优势、性能指标:本本发明公开了一种多摄像机的协同目标搜索方法。该方法包括:1.利用标定板以及云台相机回传角度离线训练云台相机的运动模型;2.各相机的初始参数标定包括相机内参以及各相机之间的相对位姿;3.各相机实时检测疑似目标,在发现目标后将信息传至其他相机,随后基于云台相机的运动模型,依据对目标的先验信息设计一迭代的基于关键点的目标搜索算法控制其他相机在空间中快速搜索目标。
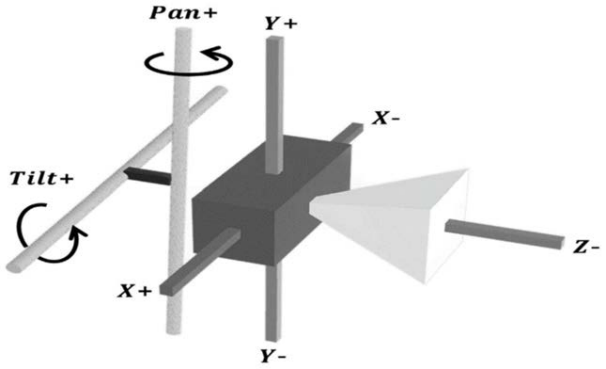
图1 任意旋转轴的云台相机模型
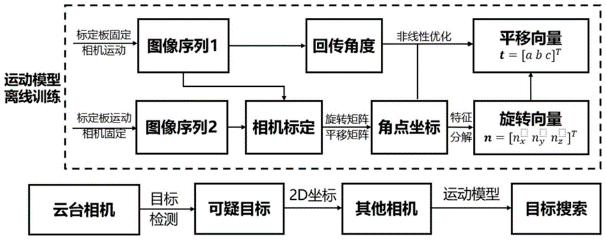
图2多摄像机的协同目标搜索方法流程图
产业化前景描述:如何精确地控制云台相机的运动,如何高效地搜索目标,以实现对目标的状态更加准确的感知,从而降低监管成本。该专利文本提出了以下技术效果:
1. 在云台相机运动建模时,加入了标定板的运动,使得各标定板平面与相机平面之间的单应性矩阵有较高区分度,从而得到了更为精确的标定结果,使得云台相机的运动建模结果更为精确。
2. 在求解云台相机旋转轴的平移向量环节加入了可靠的旋转角度信息作非线性优化,从而使得对云台相机旋转轴平移向量的求解更为准确。
3. 设计了一迭代的基于关键点的目标搜索算法,实现了对可疑目标的高效搜索。
低空飞行器智能监测、物联网设备定位识别、空间姿态模拟控制。
前述成果已申请专利并获得授权。
□样品、实验阶段
□小批量生产、工程应用阶段
☑试生产、应用开发阶段
□批量生产、成熟应用阶段
史治国,浙江大学求是特聘教授、博士生导师,教育部长江学者特聘教授,浙江省协同感知与自主无人系统重点实验室常务副主任。长期从事阵列信号处理、张量信号处理、人工智能信号处理的理论与技术研究,支撑低空飞行器智能监测、物联网设备定位识别、空间姿态模拟控制等应用。获评爱思唯尔2020、2021、2022、2023中国高被引学者,获2022年度浙江省自然科学一等奖、2022年度中国科技产业化促进会科技创新一等奖、2020年度中国人工智能学会技术发明一等奖、2014年度教育部科技进步一等奖。
浙大工研院成果转化服务中心,0571-88982927。
注:所有成果技术资料来自研究团队,未经授权,请勿转载!
咨询授权请联系:0571-88982927

电话:0571-88982935
传真:0571-88982801
地址:浙江省杭州市西湖区西园八路3号浙大紫金科创小镇E1楼六楼
