
发明人:徐元欣,范双双,李波,王同琛,毛佳,余睿,蒋丞,徐文
申请日期:2017-03-24
授权日期:2017-12-26
本专利对应产品、技术优势、性能指标:本实用新型公开了一种用于水中设备布放和回收的吊钩,包括钩颈、钩背、钩舌以及密封钩口的锁扣,还包括连接钩舌前端增加钩舌长度和增大钩口的钩舌延伸段;本实用新型的用于水中设备布放和回收的吊钩,通过改进钩舌的结构,从而使水中设备布放和回收效率得到了明显提升,进而提高了这一过程的安全性。
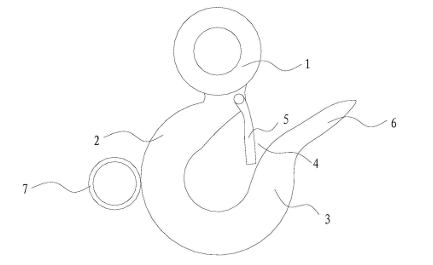
图 用于水中设备布放和回收的吊钩的结构示意图(包括钩颈1,钩背2,钩舌3,密封钩口4的锁扣5以及连接钩舌3前端增加钩舌3长度和增大钩口4的钩舌延伸段6。锁扣5为锁杆,锁杆一端铰接在钩颈1上另一端通过弹簧抵紧在钩舌3内侧)
产业化前景描述:如何设计更加合理的水中设备布放和回收系统,提高设备布放和回收过程的效率和安全性,解决设备在水中与母船碰撞的概率,提高设备安全。
本实用新型的吊钩用于水中设备的布放和回收,通过改进钩舌的结构提高了回收效率和安全性。增加挂耳环提升了布放和回收过程操作的可控制性和精准性。因此,本实用新型的技术效果是提高了水中设备的回收效率和操作的可控制性和精准性。
发明人:徐元欣,范双双,李波,王同琛,毛佳,余睿,蒋丞,徐文
申请日期:2017-03-24
授权日期:2017-12-19
本专利对应产品、技术优势、性能指标:本实用新型公开了一种用于水中设备姿态控制的勺钩,包括两股间隔布置且沿着同一平面延伸的成型杆和连接两成型杆的连接杆组,每根成型杆包括:勺型杆,杆体半包围水下设备的外周;固定杆,与所述勺型杆的后端固定连接;本实用新型使用环境广泛,在多种水中设备尤其是水下自主航行器的姿态控制、布放与回收过程中,起到了明显的辅助作用;取代了传统的直杆、半圆形叉杆等的功能,做到了集诸多功能于一体,在航行器的静水测试和海洋航行过程中都发挥了重要的作用。
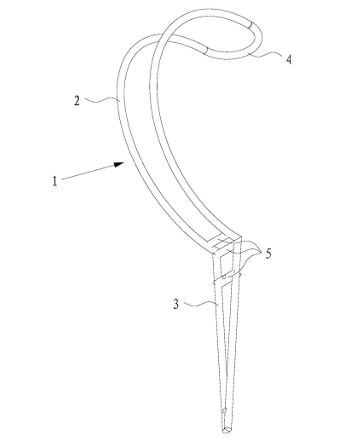
图1为本实用新型的勺钩的立体结构示意图(每根成型杆1包括:勺型杆2,杆体半包围水下设备的外周,本实施例中为半圆形结构;固定杆3,与勺型杆2的后端固定连接)
产业化前景描述:如何设计更加合理的辅助杆结构,以提高水中设备姿态控制的效率,减少控制、布放和回收等操作的耗时,并设计更加有效的辅助杆前段结构。
本实用新型的勺钩可以用于多种水中设备的姿态控制和布放与回收过程,特别是水下自主航行器的姿态控制。它集多种功能于一体,使用广泛,能够在航行器的静水测试和海洋航行过程中发挥重要作用。
发明人:徐元欣,李波,蒋丞,余睿,王同琛,徐文
申请日期:2017-12-29
授权日期:2020-09-01
本专利对应产品、技术优势、性能指标:本发明公开了一种AUV与接驳站水下对接的末端视觉导引方法,通过采用单导引灯、单目辅助欠驱动自主水下航行器与水下接驳站进行对接。该方法根据航行器水平方向控制的原理,设计了将视觉信息与航行器姿态信息结合的导引方式,并设计了水平方向航行器对接的控制器,该控制器可以使得航行器尽量正对接驳站朝向入坞,从而提高航行器的对接成功率。本发明可以简化视觉导引算法,降低对信号处理芯片性能要求,并且可以降低设备成本。此外,本发明结合航行器深度维控制原理将垂直方向视觉信息转化为深度信息,并利用航行器的姿态角对视觉信息进行补偿,提高了航行器对接过程中深度方向控制的可靠性。
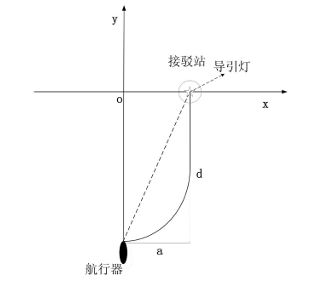
图1 下航行器与接驳站对接水平方向示意图

图2水下航行器与接驳站对接视觉三维导引示意图
产业化前景描述:在水下对接过程中,如何利用视觉信息进行导引,以提高对接成功率和导航精度?如何减少摄像头设备的数量,同时满足对接要求?如何在接驳站深度变化时,利用视觉导引进行对接?本发明提出了一种采用单灯、单目导引水下航行器对接的方法,简化了图像处理算法,降低了水下设备使用成本。同时,根据欠驱动水下航行器的特点,设计了水平方向与垂直方向对接视觉导引方法,提高了航行器的对接成功率。本发明还提出了将视觉信息与航行器姿态信息结合的导引方式,并设计了水平方向航行器对接的控制器,使得航行器能够尽量正对接驳站朝向入坞,提高了对接成功率。本发明还结合了航行器深度维控制原理将垂直方向视觉信息转化为深度信息,并利用航行器的姿态角对视觉信息进行补偿,提高了航行器对接过程中深度方向控制的可靠性。
发明人:徐元欣,刘阳曦,刘陈展,俞俊涛,毛佳,辜一帆,余睿,王曰海
申请日期:2016-03-07
授权日期:2018-06-15
本专利对应产品、技术优势、性能指标:本发明公开了一种主从结构多节点网络的时间同步方法,其针对网络的各个节点物理上通过有线进行连接,节点间的通讯可采用RS485、RS422、RS232、CAN总线等方式,设计了两种时钟同步机制:一种是应答式机制,另一种是广播式机制。本发明通过FPGA时钟采样可以得到各个报文发送和接收的准确时刻;通过应答式同步方式计算传输平均时延和主从时钟偏移,之后加以补偿时间精度可以达到纳秒级的高精度时间同步;通过广播式同步方式,在忽略通道传输时延的条件下可以达到较高精度的时间同步。

图1(a) 一个主时钟节点带多个从时钟节点的组网结构示意图
图1(b) 一个主节点与一个从节点的组网结构示意图
产业化前景描述:网络中各节点的时间/时钟同步是基于网络的实时控制系统数据调度和任务的核心技术之一。目前应用于网络时钟同步的协议主要有基于GPS、NTP和PTP的时钟同步协议,它们各自的优缺点和适用场景不同,需要根据实际情况选择合适的时钟同步协议。
本发明通过使用FPGA时钟采样技术,可以准确地获取各个报文发送和接收的时刻。同时,通过应答式同步方式计算传输平均时延和主从时钟偏移,并进行补偿时间精度,可以实现纳秒级的高精度时间同步。此外,在忽略通道传输时延的条件下,通过广播式同步方式可以达到较高的时间同步精度。
发明人:徐元欣,余睿,蒋丞,向彦博,夏伊倩,周杰,曾大亨,徐文
申请日期:2018-01-24
授权日期:2020-04-24
本专利对应产品、技术优势、性能指标:本发明公开一种水面/水下航行器与定位设备间的航向角偏差估计方法,首先航行器在水面或水下进行定向直线航行,同时通过自身定位和定位设备定位,获得大地东北向坐标下航行器的离散定位点数据;然后采用数据拟合将航行器自身运动轨迹点和定位设备测试数据进行直线拟合,两条直线间的角度差即为航行器和定位设备的航向角偏差值;对同航向进行多次测试,并将多次数据求平均,即可获得该方向下的航向角偏差;然后控制航行器朝别的不同方向进行直线航行,重复上述步骤,获得其它方向下的航向角的偏差,若多个方向下的航向角偏差的相对误差小于5%,则再次求平均。该方法操作便捷,定位设备获取的定位数据更加精准,适用于各种不同的航行器航行环境。
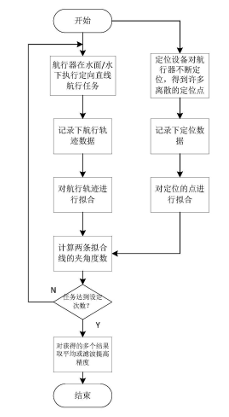
图 本发明的偏差估计方法流程图
产业化前景描述:如何利用水下导航设备和对端定位设备对航行器进行辅助定位,以提高航行器的导航精度?如何解决航行器推算位置精度不高的问题?如何解决航行器和对端定位设备之间的姿态偏差引起的导航精度问题?如何提高航行器的导航精度?
本发明提供了一种简单易操作的航向角偏差估计方法,可以提高定位设备获取的定位数据的精准性,同时适用于各种不同的航行器航行环境。
生产专用起重机制造;导航、测绘、气象及海洋专用仪器制造;航空器装备制造;通信系统设备制造
前述成果已申请专利并获得授权。
□样品、实验阶段
□小批量生产、工程应用阶段
☑试生产、应用开发阶段
□批量生产、成熟应用阶段
徐元欣,博士,副教授,博士生导师,浙江大学信息与电子工程学院从事教学与科研工作,2003年获信息与通信工程专业博士学位。研究方向为智能水下机器人、数字通信系统、水声通信组网及定位等。近年来作为骨干参与2项国家攻关项目,承担和负责863子课题1项、国家科技支撑计划子课题1项、浙江省科技计划项目2项、浙江省自然科学基金2项等、横向合作项目多项,发表学术论文50余篇,授权专利10余项。
浙大工研院成果转化服务中心,0571-88982927。
注:所有成果技术资料来自研究团队,未经授权,请勿转载!
咨询授权请联系:0571-88982927

电话:0571-88982935
传真:0571-88982801
地址:浙江省杭州市西湖区西园八路3号浙大紫金科创小镇E1楼六楼
